
رونمایی از رباتهای ریزِمغناطیسی در کره جنوبی
دانشمندان کرهای با تلاشهای پیگیرانه، به گروههایی هوشمند از رباتهای میکروسکوپی مغناطیسی رسیدهاند که شبیه مورچهها با هم همکاری میکنند تا به کارهای خارقالعاده دست یابند. این ریزرباتها قادرند اشیایی را که چندین برابر خودشان هستند، بلند کرده و جابهجا کنند. نتایج این پژوهش که در تاریخ ۱۸ ام دسامبر توی مجلهی Cell Press چاپ شده، نشون میده که این گروههای رباتیک ریز که زیر یه میدان مغناطیسی چرخان فعال هستن، میتونن کارهای سخت توی محیطهای پرچالش انجام بدن. این کارها شامل درمانهای کمتهاجمی برای رگهای مسدودشده و هدایت دقیق موجودات زنده میشه.
ژونگ جائه وی، که توی این تحقیق از بخش مهندسی ارگانیک و نانو دانشگاه هانیانگ سئول مشغول بوده، میگه: «توانایی بالای این گروههای رباتیک ریز در تطبیق با محیط و استقلال بالای گروه توی کنترل کردن، ما رو شگفتزده کرد.» وی و همکارانش، عملکرد این گروههای رباتیک ریز رو با ترکیبهای گوناگون در انجام وظایف مختلف آزمایش کردن.
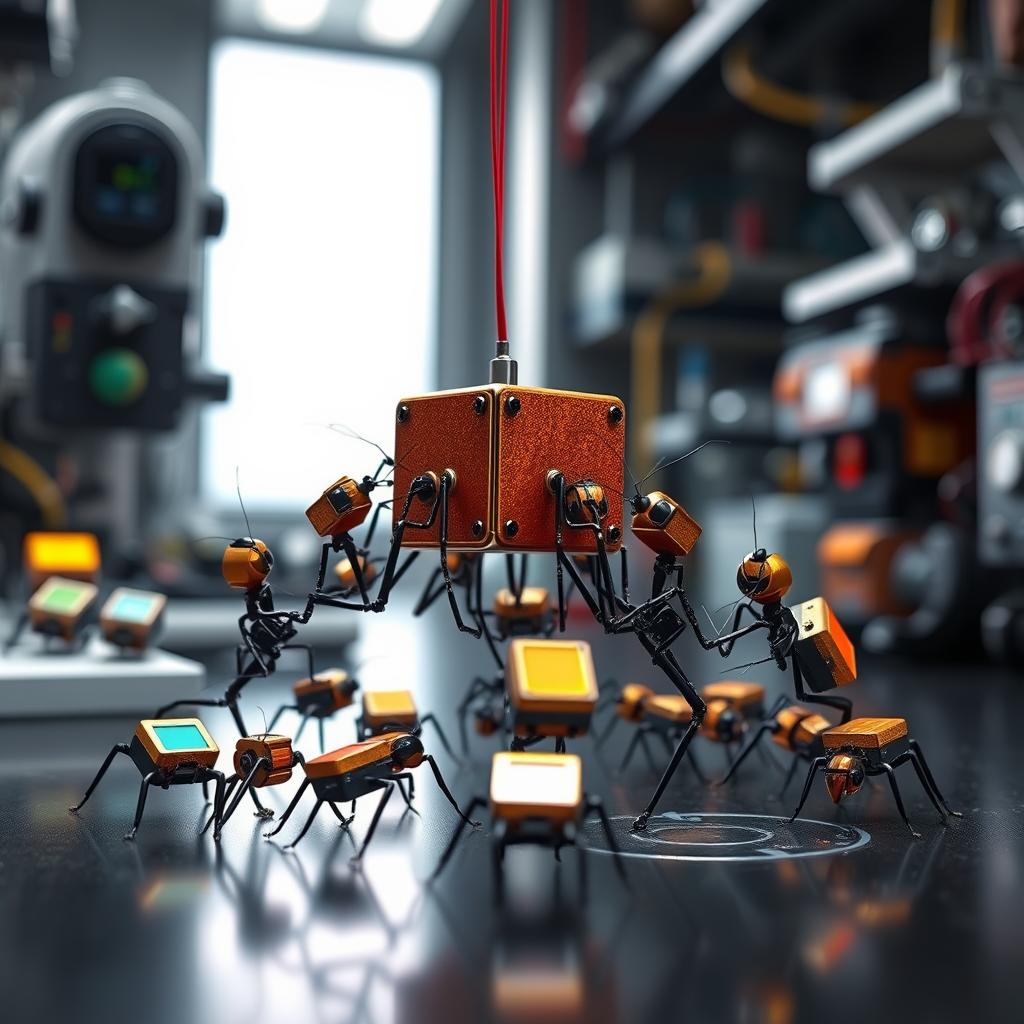
آنها فهمیدند که گروههایی با ابعاد بزرگ، میتونن از موانعی که پنج برابر طول یه ربات ریز هستن، بالا برن و یکییکی از روی مانعها بپرن. یه گروه بزرگ از ۱۰۰۰ ربات ریز متراکم، یه قایق ساختن که روی آب شناور میشد و دور یه قرص که ۲۰۰۰ برابر از هر ربات تکنفره سنگینتر بود، میچرخید. این موضوع به گروه اجازه میده که دارو رو از طریق مایع حمل کنه.
توی زمینهای خشک، یه گروه ربات تونست باری رو که ۳۵۰ برابر وزن یه ربات تکنفره بود، جابهجا کنه، و یه گروه دیگه از رباتهای ریز موفق شدن لولههایی رو که شبیه رگهای خونی گرفته بودن، باز کنن. در نهایت، تیم وی با حرکات چرخشی و کششی، سیستمی درست کرد که گروههای ربات میتونن حرکات موجودات کوچیک رو هدایت کنن.
تحقیقات جدید در زمینه رباتهای میکرو
دانشمندا روز به روز بیشتر به بررسی این موضوع علاقهمند شدن که چطور همکاری بین دستههای رباتها میتونه به اهداف مشترک برسه. این علاقه از رفتار مورچهها الهام گرفته شده، که چطوری با هم جمع میشن تا یه فاصله رو پر کنن یا به شکل یه قایق کنار هم قرار میگیرن تا توی سیل دوام بیارن. به همین ترتیب، همکاری باعث میشه رباتها در برابر خراب شدن مقاومتر بشن؛ حتی اگه بعضی از اعضای گروه نتونن به هدف برسن، بقیه به انجام دادن حرکات از پیش تعیینشدهشون ادامه میدن تا وقتی که تعداد کافی ازشون موفق بشن.

او میگه: «تحقیقات قبلی توی زمینه رباتیک دستهای بیشتر روی رباتهای کروی تمرکز داشت که با تماس نقطهای به هم وصل میشدن.» تو این مطالعه، محققها یه دسته از رباتهای میکرو مکعبی ساختن که به خاطر سطوح بزرگتر، جذب مغناطیسی قویتری دارن، چون تمام سطوح هر مکعب میتونه با بقیه تماس پیدا کنه. هر ربات میکرو ۶۰۰ میکرومتر ارتفاع داره و از بدنه اپوکسی ساخته شده که با ذرات آهنربای نئودیمیم-آهن-بور (NdFeB) پر شده. این ویژگی به رباتها این امکان رو میده که به میدانهای مغناطیسی پاسخ بدن و با رباتهای میکروی دیگه ارتباط برقرار کنن.
با انرژی دادن به رباتها از طریق یه میدان مغناطیسی که با چرخیدن دو آهنربای متصل ایجاد میشه، این دسته میتونه خود به خود شکل بگیره. محققها رباتها رو برنامهریزی کردن که در ترکیبهای مختلف با تغییر زاویه مغناطیسیشدن به هم وصل بشن. او میگه: «ما یه روش تولید انبوه باصرفه توسعه دادیم که از قالبگیری و مغناطیسیکردن توی محل استفاده میکنه و هندسه و مشخصات مغناطیسی یکسانی رو برای عملکرد ثابت تضمین میکنه.»
او همچنین اضافه میکنه: «با اینکه نتایج این مطالعه امیدوارکننده هستن، ولی دستهها برای آماده شدن برای کاربردهای واقعی، به سطوح بالاتری از استقلال نیاز دارن.» او توضیح میده: «دستههای رباتهای میکرو مغناطیسی نیازمند کنترل مغناطیسی بیرونی هستن و توانایی مسیریابی خودشون توی فضاهای پیچیده یا محدود مثل رگهای خونی واقعی رو ندارن.» او ادامه میده: «تحقیقات آینده روی افزایش سطح استقلال دستههای رباتهای میکرو تمرکز خواهد داشت، مثل کنترل بازخورد توی زمان واقعی حرکات و مسیرهای اونها.»
“`


بیشتر بخوانید
مدیتیشن یک روز پربرکت برای جذب عشق وامنیت و سلامتی
خود هیپنوتیزم درمان زود انزالی در مردان توسط هیپنوتراپیست رضا خدامهری
تقویت سیستم ایمنی بدن با خود هیپنوتیزم
شمس و طغری
خود هیپنوتیزم ماندن در رژیم لاغری و درمان قطعی چاقی کاملا علمی و ایمن
خود هیپنوتیزم تقویت اعتماد به نفس و عزت نفس