
رشد یک الگوریتم هدایت پیشرفته برای حشرات سایبورگ
محققان دانشگاه فناوری نانیانگ سنگاپور (NTU Singapore)، دانشگاه اوساکا و دانشگاه هیروشیما، یه الگوریتم جدید برای هدایت گروهی از حشرات سایبورگ ساختن که این حشرات رو از گیر کردن توی فضاهای سخت و پرچالش حفظ میکنه. این پیشرفت که توی مجلهی Nature Communications منتشر شده، گامی بزرگ تو زمینه رباتیک جمعی محسوب میشه. این تکنولوژی میتونه درهای تازهای رو به روی کاربردهایی مثل امدادرسانی، ماموریتهای جستجو و نجات و بررسی زیرساختها باز کنه.
حشرات سایبورگ، حشرات واقعی هستن که ابزارهای الکترونیکی کوچکی روی پشتشون نصب شده. این ابزارها شامل حسگرهای مختلفی مثل دوربینهای نوری و مادون قرمز، باتری و آنتن برای ارتباط هستن. این وسایل بهشون اجازه میده تا حرکاتشون از راه دور کنترل بشه. اولین بار، پروفسور هیراتاکا ساتو از دانشکده مهندسی مکانیک و هوافضای دانشگاه NTU سنگاپور، در سال 2008 تونست یه حشره سایبورگ رو کنترل کنه. البته، یه حشرهی تنها، برای کارهایی مثل عملیاتهای جستجو و نجات که بازماندگان توی مناطق مختلف پراکندهان، کافی نیست. ضمن اینکه یه بازه زمانی ایدهآل 72 ساعته برای پیدا کردن این افراد وجود داره.
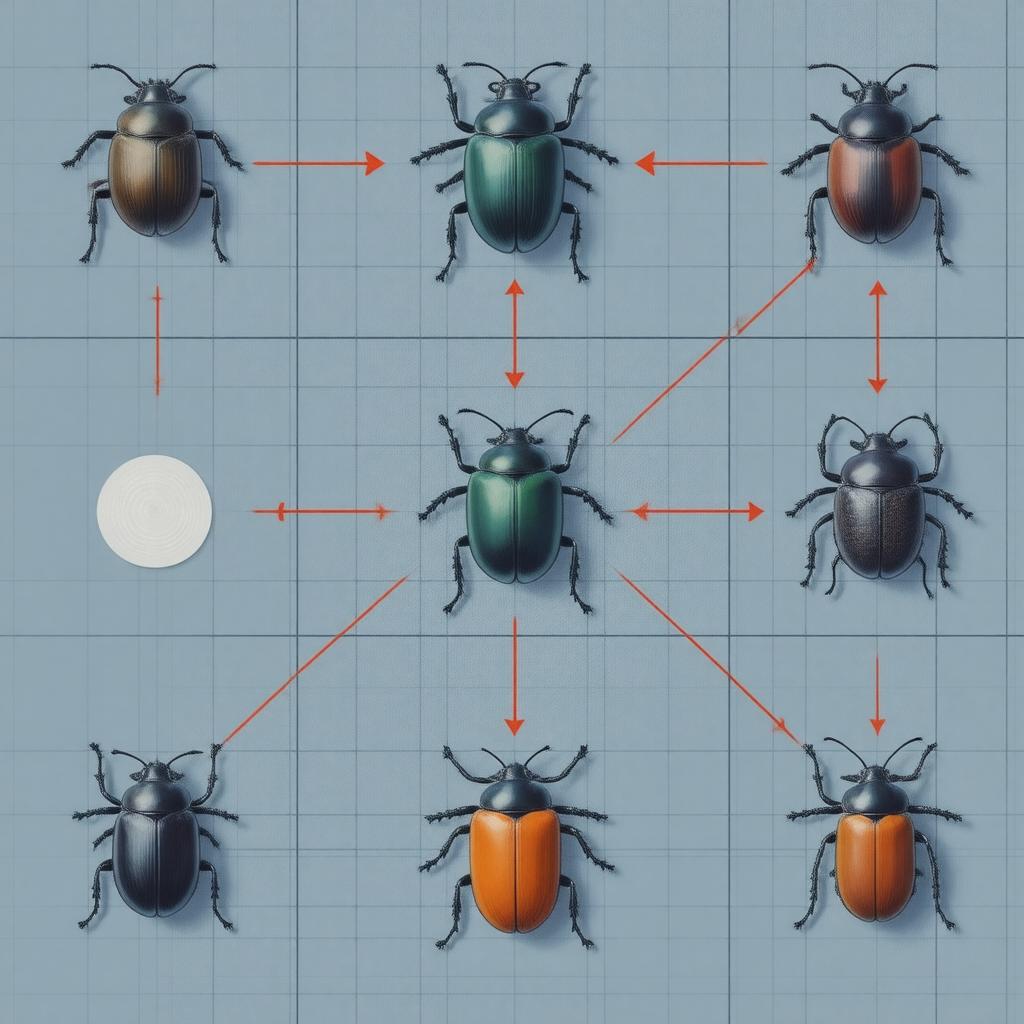
پروفسور ساتو و همکاراش، تو سالهای 2021 و 2024، با همکاری آژانس علم و فناوری تیم خانگی سنگاپور (HTX) و Klass Engineering and Solutions نشون دادن که چطور میشه از حشرات سایبورگ برای عملیاتهای جستجو و نجات در آینده استفاده کرد. آخرین مقالهشون درباره یه سیستم جمعی جدید هست که از یه روش رهبر-پیرو استفاده میکنه. تو این روش، یه حشرهی سایبورگ بهعنوان رهبر عمل میکنه و 19 حشرهی دیگه رو هدایت میکنه.
پروفسور ماساکی اوگورا از دانشگاه هیروشیما و پروفسور واکامیا نائوکی از دانشگاه اوساکا، که نویسندههای همکار این مقاله هستن، الگوریتم کنترل جمعی و برنامههای کامپیوتری رو طراحی کردن. پروفسور هیراتاکا ساتو و تیمش هم گروه حشرات سایبورگ رو آماده کردن، الگوریتم رو روی کولهپشتیهای الکترونیکی حشرات پیادهسازی کردن و آزمایشهای فیزیکی رو تو سنگاپور انجام دادن.

مزایای الگوریتم نوین هدایت جمعی
دانشمندا تو آزمایشگاه، به چندین مزیت برای الگوریتم جدیدشون اشاره کردن. این الگوریتم به حشرات سایبورگ اجازه میده آزادانهتر حرکت کنن، که خطر گیر کردن توی موانع رو کم میکنه. حشرات سایبورگ نزدیک هم میتونن به هم کمک کنن تا گیرهایی که پیش میاد رو حل کنن.
نحوه عملکرد گروه حشرات سایبورگ
تحقیقات قبلی نشون داده بود که میشه یه حشره سایبورگ یا گروههایی از اونا رو با الگوریتمهایی که دستورالعملهای دقیق و پیچیدهای برای هر حشره دارن، کنترل کرد. اما این روش برای هماهنگی حرکت یه گروه بزرگ مناسب نبود. تو روش جدید، اول یه حشره بهعنوان رهبر توسط الگوریتم انتخاب میشه. بعد از مقصد مورد نظر باخبر میشه و کولهپشتی کنترل اون با کولهپشتیهای بقیه اعضای گروه هماهنگ میشه تا گروه رو هدایت کنه. این روش “رهبر-تور” به گروه اجازه میده که خودشونو با شرایط وفق بدن. اینطوری حشرات میتونن به هم کمک کنن تا از موانع عبور کنن و اگه یه نفر گیر کرد، حرکاتشون رو تنظیم کنن.

حشراتی که استفاده میشن، سوسکهای هیسزن ماداگاسکار هستن که یه مدار سبک، حسگرها و یه باتری شارژی روی پشتشون دارن. این سیستم هدایت خودکار بهشون کمک میکنه تا تو محیطشون حرکت کنن و به سمت هدف برن. حشرات سایبورگ انرژی خیلی کمتری نسبت به رباتهای معمولی مصرف میکنن، چون رباتها برای حرکت به موتورهایی با مصرف انرژی زیاد نیاز دارن. پاهای حشره حرکت لازم برای جابجایی کولهپشتی رو فراهم میکنن، در حالی که کولهپشتی با اعمال تحریکات الکتریکی کوچیک، حشره رو به سمت یه جهت خاص هدایت میکنه. وقتی این سیستم با الگوریتم کنترل جمعی ترکیب میشه، غریزه حشرات بهشون اجازه میده که تو زمینهای پیچیده حرکت کنن و سریع به تغییرات محیط واکنش نشون بدن.
کاهش نیاز به هدایت مستقیم حشرات با الگوریتم جدید
توی آزمایشها، الگوریتم جدید نیاز به هدایت مستقیم حشرات رو نسبت به روشهای قبلی حدود 50 درصد کم کرده. این باعث میشه حشرات بتونن مستقل از موانع عبور کنن و مشکلاتی مثل گیر کردن یا محبوس شدن رو حل کنن. پروفسور هیراتاکا ساتو از دانشگاه NTU گفت که این تکنولوژی میتونه توی ماموریتهای جستجو و نجات، بررسی زیرساختها و نظارت بر محیط زیست مفید باشه، جایی که فضاهای تنگ و شرایط غیرقابل پیشبینی، روباتهای معمولی رو ناکارآمد میکنه.
اون توضیح داد: “برای انجام عملیاتهای جستجو و بازرسی، باید مناطق وسیعی بهطور موثر بررسی بشن، که این کار غالباً تو زمینهای سخت و پر از موانع انجام میشه. این ایده شامل استقرار چندین گروه از حشرات سایبورگ برای حرکت و بررسی این مناطق بسته هست. وقتی حسگرهای موجود تو کولهپشتی یه حشره سایبورگ، یه هدف رو شناسایی میکنن، مثلاً آدمها توی ماموریتهای جستجو و نجات یا نقصهای تو زیرساختها، میتونن بهطور بیسیم سیستم کنترل رو خبر کنن.”
پروفسور ساتو بهخاطر کارهای پیشگامانهاش در زمینه حشرات سایبورگ شناخته شده. او قبلاً هم بهخاطر تحقیقاتش که تو سال 2009 توسط مجله TIME بهعنوان یکی از 50 اختراع برتر و توسط MIT Technology Review، بهعنوان یکی از 10 تکنولوژی نوظهور 2009 (TR10) شناخته شد، مشهور شد.
پروفسور ماساکی اوگورا، نویسنده همکار این مقاله و استاد در دانشکده علوم و مهندسی پیشرفته دانشگاه هیروشیما، گفت: “الگوریتم کنترل گروه ما یه پیشرفت قابل توجه تو هماهنگی گروههای حشرات سایبورگ برای ماموریتهای پیچیده جستجو و نجاته. این نوآوری میتونه بهطور چشمگیری کارایی پاسخ به بلایای طبیعی رو افزایش بده و همچنین راههای جدیدی رو برای تحقیق تو زمینه کنترل گروهها باز کنه. این نشون میده که چقدر مهمه که روشهای کنترلی بسازیم که تو موقعیتهای واقعی خوب عمل میکنن، و دیگه فقط به مدلها و شبیهسازیهای تئوری محدود نباشیم.”
پروفسور واکامیا نائوکی، نویسنده همکار دیگه و استاد در دانشکده علوم و فناوری اطلاعات دانشگاه اوزاکا، توضیح داد: “برخلاف روباتها، حشرات اونطوری که ما میخوایم عمل نمیکنن. اما بهجای تلاش برای کنترل دقیق اونها بهزور، متوجه شدیم که یه رویکرد ملایمتر و غیررسمیتر نه تنها بهتر جواب میده، بلکه باعث ظهور رفتارهای پیچیدهای مثل همکاری هم میشه که طراحی اونا بهعنوان الگوریتمها خیلی سخت و چالشبرانگیزه. این یه کشف شگفتانگیز بود. در حالی که ممکنه اعمال اونا در نگاه اول بیهدف بهنظر برسه، اما هنوز هم بهنظر میرسه که چیزای زیادی هست که میتونیم از رفتارهای پیچیده و ظریف موجودات زنده یاد بگیریم.”
آخرین پیشرفت اونا، توانایی بالقوه سیستمهای بیوهیبرید رو تو حل مشکلات دنیای واقعی و اهمیت همکاریهای بینرشتهای جهانی نشون میده. بعد از این، تیم مشترک قصد داره الگوریتمهایی بسازه که امکان انجام اقدامات هماهنگ گروهی فراتر از حرکات ساده، مثل حمل مشترک اشیاء بزرگ رو فراهم کنه. اونا همچنین برنامهریزی کردن که آزمایشهایی رو تو محیطهای خارجی، از جمله تودههای آوار که معمولاً تو مناطق بلایای طبیعی پیدا میشه، انجام بدن تا اثربخشی الگوریتم رو تو موقعیتهای پیچیده و واقعی تأیید کنن.
“`
بیشتر بخوانید
مدیتیشن یک روز پربرکت برای جذب عشق وامنیت و سلامتی
خود هیپنوتیزم درمان زود انزالی در مردان توسط هیپنوتراپیست رضا خدامهری
تقویت سیستم ایمنی بدن با خود هیپنوتیزم
شمس و طغری
خود هیپنوتیزم ماندن در رژیم لاغری و درمان قطعی چاقی کاملا علمی و ایمن
خود هیپنوتیزم تقویت اعتماد به نفس و عزت نفس