شکستن رکورد سرعت شنای رباتهای مجهز به فناوریهای نوین
گروهی از محققان موفق شدند رکورد سرعت رباتهای شناگر نرم را جابهجا کنند. آنها با اقتباس از ساختار بدن پرتوهای مانتا، توانستند کنترل ربات را در آب بهبود بخشند. جی یین، سرپرست این پژوهش و استاد یار مهندسی مکانیک و هوافضا در دانشگاه ایالت کارولینای شمالی، میگوید: «دو سال پیش، ما یک ربات نرم آبی معرفی کردیم که توانست به سرعت متوسط ۳٫۷۴ برابر طول بدن خود در ثانیه حرکت کند.» وی ادامه میدهد: «ما در طراحی اون ربات تغییراتی ایجاد کردیم. ربات نرم جدید ما در مصرف انرژی، بهینهتره و به سرعت ۶٫۸ برابر طول بدن در ثانیه میرسه. علاوه بر این، مدل قبلی فقط روی سطح آب میتونست شنا کنه، در حالی که ربات جدید قادر هست در کل ستون آب، بالا و پایین بره.»
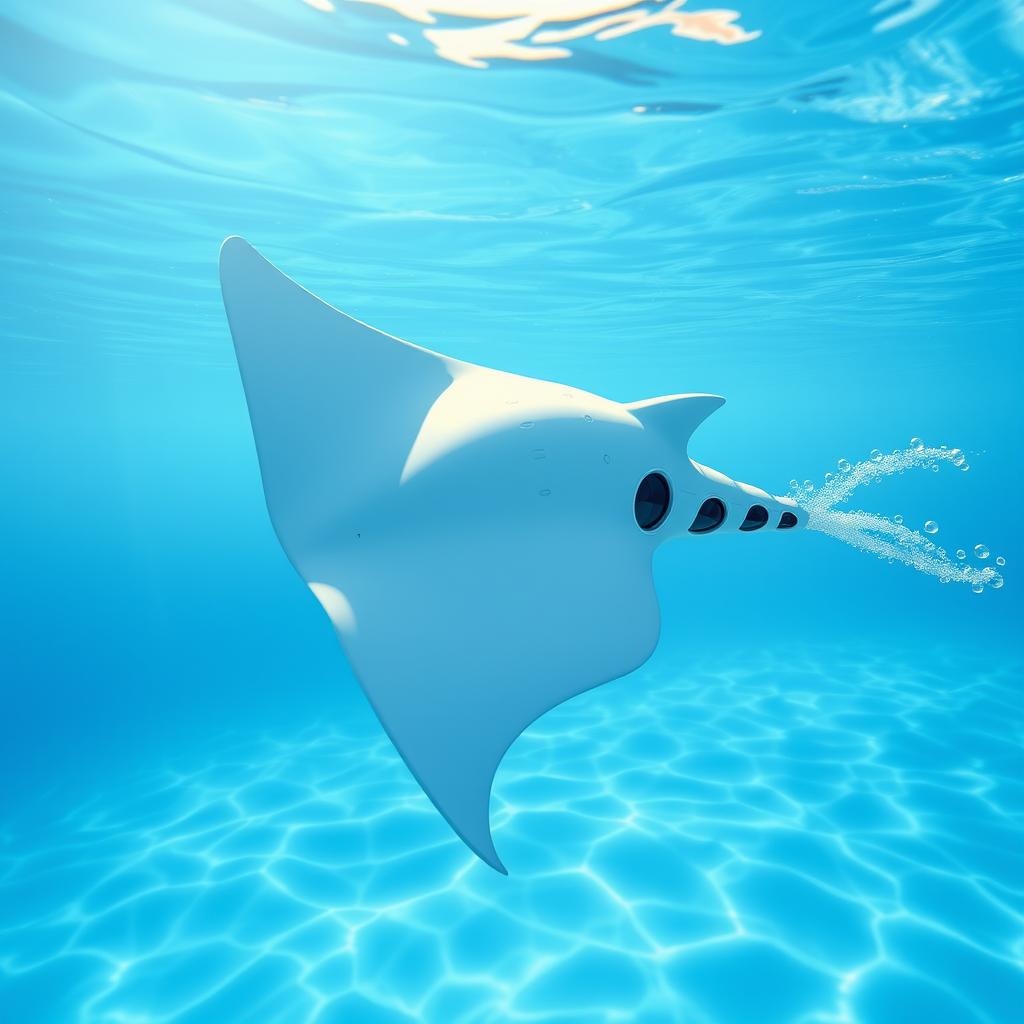
این ربات نرم، بالههایی شبیه به بالههای پرتوهای مانتا دارد و از جنس موادی ساخته شده که هنگام باز شدن بالهها، شکل خود را حفظ میکنند. بالهها به یک بدنهی انعطافپذیر و سیلیکونی متصل هستند که درون اون یک محفظه قرار داده شده که قابلیت پر شدن از هوا رو داره. دمیدن هوا به داخل محفظه باعث میشه بالهها خم بشن؛ درست مثل حرکتی که پرتوهای مانتا موقع بال زدن انجام میدن. وقتی هوا از محفظه خارج میشه، بالهها بهطور خودکار به جای اولشون برمیگردند. هایتائو کینگ، نویسندهی اصلی مقاله و دانشجوی دکترا در دانشگاه NC State، توضیح میده: «وارد کردن هوا به داخل محفظه، به سیستم انرژی وارد میکنه. بالهها تمایل دارن به حالت اولیه خودشون برگردن، بنابراین بیرون دادن هوا هم انرژی موجود در بالهها رو آزاد میکنه. این یعنی ما فقط به یک محرک برای ربات نیاز داریم و این به حرکت سریعتر کمک میکنه.»
مطالعهی دینامیک سیالاتی بدن پرتوهای مانتا، نقش اساسی در کنترل حرکت عمودی ربات نرم داشت. جیچنگ گو، از نویسندگان مقاله و دانشجوی دکترای دانشگاه ویرجینیا، میگوید: «ما الگوی شنای پرتوهای مانتا رو بررسی کردیم و تونستیم اون رفتار رو تقلید کنیم تا بتونیم کنترل کنیم که ربات به سمت بالا شنا کنه، به سمت پایین حرکت کنه یا در یک عمق ثابت از آب بمونه.» وی اضافه میکند: «وقتی پرتوهای مانتا شنا میکنن، دو جت آب تولید میکنن که بهشون کمک میکنه به جلو برن. مانتاها با عوض کردن نحوهی شنا کردنشون، مسیرشون رو عوض میکنن.»
کنترل حرکات عمودی ربات شناگر با روشهای نوین
ما از یک روش مشابه برای کنترل حرکات عمودی این ربات شناگر استفاده کردیم. هنوز داریم روی روشهایی کار میکنیم که به ما امکان کنترل دقیق حرکات جانبی ربات رو بده. یوآن ژو، یکی دیگر از نویسندگان همکار این مقاله و استادیار مهندسی مکانیک در دانشگاه کالیفرنیا، ریورساید، میگوید: «بهطور مشخص، شبیهسازیها و آزمایشات نشون دادن که پاشش رو به پایین آب، که توسط ربات تولید میشه، قویتر از پاشش رو به بالای آب هست. اگر ربات بالههاش رو سریع تکون بده، به سمت بالا حرکت میکنه. اما اگه سرعت عملکرد رو کم کنیم، ربات میتونه بین هر بار بال زدن، کمی فرو بره و در نتیجه به سمت پایین شیرجه بزنه یا در یک عمق مشخص شنا کنه.»
کینگ میگوید: «یه نکتهی دیگه که باید در نظر بگیریم اینه که ما این ربات رو با هوای فشرده تغذیه میکنیم. این مسأله مهمه، چون وقتی بالهای ربات در حالت استراحت هستن، یه نوع فضای خالی در محفظهی هوا ایجاد میشه که باعث کم شدن شناوری ربات میشه. وقتی ربات بالهاش رو آروم تکون میده، بالها مدت بیشتری در حالت استراحت هستن. به عبارت دیگه، هر چه ربات بالهاش رو سریعتر تکون بده، محفظه هوا بیشتر پر میشه و شناوری ربات هم افزایش پیدا میکنه.»

عملکرد ربات نرم در شرایط متفاوت
محققان عملکرد این ربات نرم رو تو دو موقعیت مختلف نشون دادن. اول، یکی از نمونههای ربات تونست در یک مسیر پر از مانع که کف و روی یک مخزن آب قرار داشت، حرکت کنه. دوم، پژوهشگران نشون دادن که ربات میتونه بدون هیچ اتصالی، یه بار رو روی سطح آب حمل کنه؛ از جمله منبع هوای مورد نیازش و منبع تغذیه.
یین میگوید: «این یه طراحی خیلی مهندسیشدهاس، ولی اصول اولیهی اون نسبتاً سادهاس. ربات ما با فقط یک ورودی، میتونه در یک محیط عمودی پیچیده حرکت کنه. ما الان داریم روی بهبود حرکات جانبی کار میکنیم و حالتهای عملکرد دیگه رو بررسی میکنیم که بهطور قابل توجهی تواناییهای این سیستم رو بیشتر میکنه. هدف ما اینه که این کار رو با یه طراحی انجام بدیم که سادگی زیبا رو حفظ کنه.»
انتشار مقاله در یک نشریهی علمی معتبر
مقاله ای با عنوان «جریانهای جت ناشی از چرخش خودکار برای شناگر نرم و چابک در سطح و زیر آب» با دسترسی آزاد در مجلهی Science Advances منتشر شده. این مقاله، حاصل همکاری یندینگ چی و یاویه هونگ، که دانشآموختههای سابق دکترا در دانشگاه NC State هستن، و همچنین دانیل کوئین و هایبو دونگ از دانشگاه UVA است. این پژوهش با پشتیبانی بنیاد ملی علوم تحت گرنتهای 2126072 و 2329674 و همچنین حمایت مالی دفتر تحقیقات دریایی تحت گرنت N00014-22-1-2616 انجام شده.


بیشتر بخوانید
مدیتیشن یک روز پربرکت برای جذب عشق وامنیت و سلامتی
خود هیپنوتیزم درمان زود انزالی در مردان توسط هیپنوتراپیست رضا خدامهری
تقویت سیستم ایمنی بدن با خود هیپنوتیزم
شمس و طغری
خود هیپنوتیزم ماندن در رژیم لاغری و درمان قطعی چاقی کاملا علمی و ایمن
خود هیپنوتیزم تقویت اعتماد به نفس و عزت نفس